Annotation
- 介绍
- 理解用于图像识别的卷积神经网络
- 环境设置和所需工具
- CNN开发的基本Python库
- 使用CIFAR-10数据集
- 使用Keras构建CNN架构
- 模型编译和训练配置
- 实际实施步骤
- 优缺点
- 结论
- 常见问题
CNN图像识别教程:Python、Keras与TensorFlow指南
学习如何使用Python和Keras构建用于图像识别的卷积神经网络。本教程涵盖CNN架构、数据集
介绍
卷积神经网络已经改变了计算机视觉,使机器能够以前所未有的准确性解释视觉数据。本综合教程指导您使用Python、Keras和TensorFlow构建一个实用的CNN进行图像识别。我们将涵盖从环境设置到模型评估的所有内容,提供实际实施的动手经验。无论您是探索AI教程还是构建生产系统,本指南都提供可操作的知识,用于有效的图像识别解决方案。
理解用于图像识别的卷积神经网络
卷积神经网络代表一种专门设计用于处理视觉数据的架构。与将输入数据视为扁平向量的传统神经网络不同,CNN通过其独特的层结构保留空间关系。这种空间意识使它们能够以模仿人类视觉处理的方式检测模式、边缘和纹理。层次特征提取能力使CNN在上下文和空间关系重要的复杂视觉任务中特别有效。
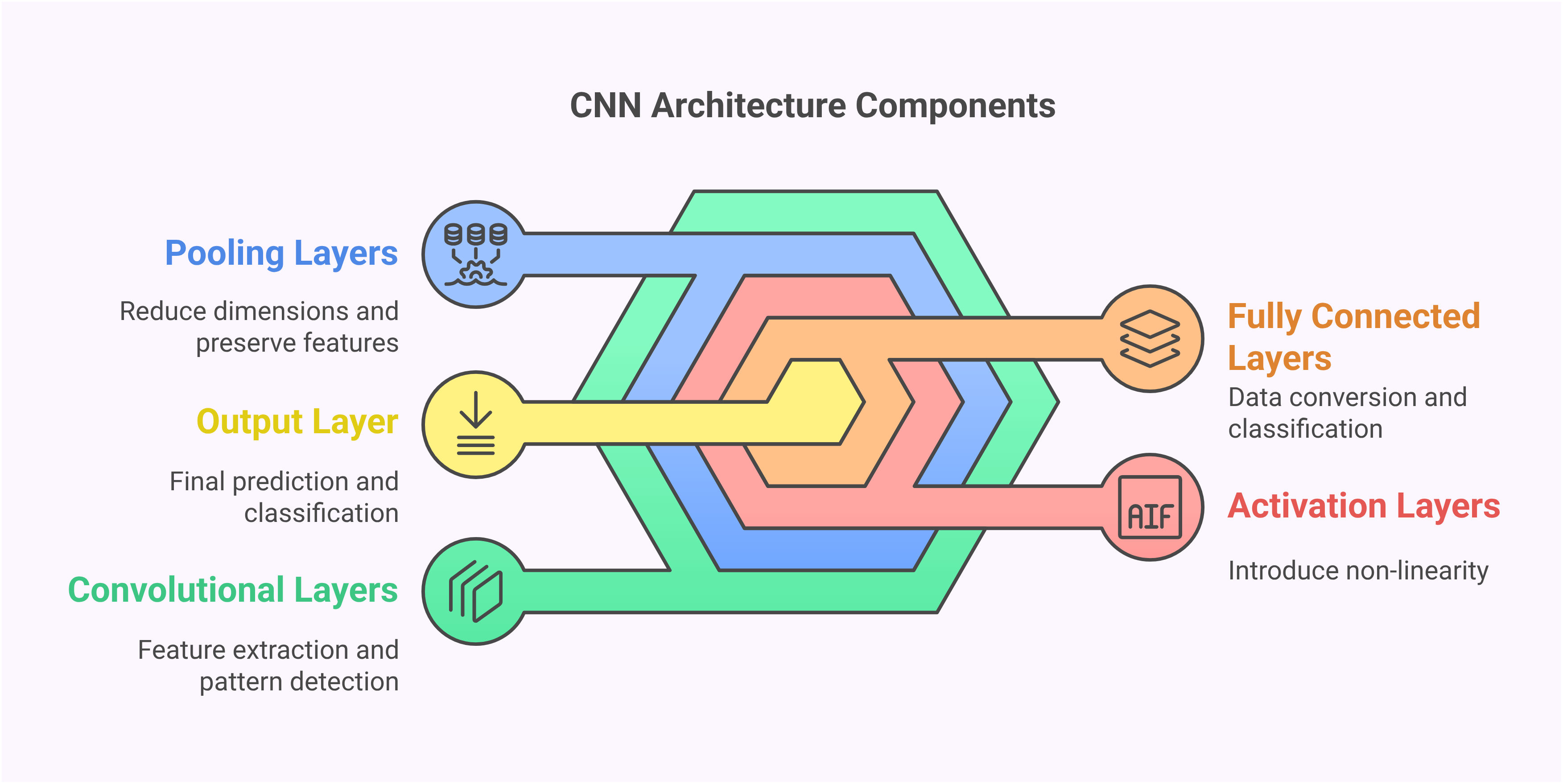
CNN的基本构建块包括卷积层(使用过滤器扫描图像以检测特征)、池化层(在保留重要信息的同时减少维度)和全连接层(执行最终分类)。这种结构化方法允许CNN自动学习相关特征而无需手动工程,使其成为从医疗诊断到自动驾驶系统等各种图像识别应用的理想选择。
环境设置和所需工具
在实施CNN之前,适当的环境配置至关重要。本教程使用Python 3.7+、TensorFlow 2.x和Keras作为主要深度学习框架。设置过程涉及安装几个关键包,为神经网络操作提供计算基础。首先创建一个虚拟环境以干净地管理依赖项,然后使用pip安装所需包。
核心包包括用于后端计算的TensorFlow、用于高级神经网络API的Keras、用于数值操作的NumPy以及用于可视化的Matplotlib。其他有用的库包括用于高级图像处理的OpenCV和用于数据预处理工具的Scikit-learn。这些工具共同为在不同硬件配置上构建和实验深度学习模型提供了坚实基础。
CNN开发的基本Python库
导入正确的库为您的图像识别系统奠定基础。关键导入包括用于数组操作的NumPy、用于网络架构的Keras层以及用于加载训练数据的数据集实用工具。每个库在CNN管道中都有特定用途,从数据操作到模型定义和训练。
来自Keras的Sequential模型提供线性层堆栈,而Conv2D实现卷积操作。Dropout层防止过拟合,BatchNormalization稳定训练,MaxPooling2D减少空间维度。理解每个组件的作用有助于设计有效架构并在开发过程中解决问题。这些库构成生产环境中使用的现代深度学习框架的核心。
使用CIFAR-10数据集
CIFAR-10数据集是图像识别任务的优秀基准,包含10个类别的60,000张彩色图像,包括飞机、汽车、鸟、猫、鹿、狗、青蛙、马、船和卡车。每张32x32像素图像代表具有不同视角和光照条件的真实世界物体,使其足够具有挑战性以展示CNN能力,同时保持计算可管理性。
数据预处理涉及通过除以255将像素值归一化到0-1范围,这稳定训练并改善收敛。独热编码将分类标签转换为二进制向量,实现多类分类。适当的预处理确保网络接收标准化输入,减少训练时间并提高最终准确性。该数据集提供与真实世界模型验证技术的实践经验。
使用Keras构建CNN架构
设计CNN架构涉及策略性地堆叠层以提取日益复杂的特征。示例架构以使用3x3过滤器和ReLU激活的卷积层开始,随后是用于正则化的dropout和批量归一化。最大池化层减少空间维度同时保留重要特征,网络以用于分类的密集层结束。
关键架构决策包括过滤器大小、池化策略和层深度。较小的过滤器(3x3)捕捉精细细节,而较大的过滤器识别更广泛的模式。过滤器数量在更深层增加以处理更复杂的特征组合。这种渐进复杂性允许网络学习层次表示,从早期层的简单边缘到更深层的复杂对象部分。此类架构构成现代计算机视觉系统的基础。
模型编译和训练配置
编译模型涉及指定损失函数、优化器和评估指标。对于多类分类,分类交叉熵测量预测误差,而Adam优化器在训练期间适应学习率。准确性指标在整个训练过程中跟踪性能,提供模型改进的即时反馈。
训练参数如批次大小和周期数显著影响结果。较小的批次提供更频繁的权重更新但需要更多计算,而较大的批次提供稳定性但可能收敛较慢。验证分割监控泛化性能,帮助早期检测过拟合。这些配置平衡训练效率与模型质量,对于开发可靠的AI应用至关重要。
实际实施步骤
实施遵循结构化工作流程,从环境设置和数据加载开始。导入必要库后,加载并预处理CIFAR-10数据集,然后使用Keras Sequential API定义CNN架构。使用适当的损失函数和优化器编译模型,然后使用准备好的数据进行训练并监控验证。
评估涉及在未见数据上测试训练好的模型并分析性能指标。逐步方法确保理解每个组件,同时构建完整工作系统。此方法适用于教程范围之外的各种图像识别任务,为真实世界项目提供可转移技能。
优缺点
优点
- 自动学习相关特征,无需手动工程
- 在复杂的图像识别任务中实现高准确性
- 对尺度、旋转和光照条件的变化具有鲁棒性
- 通过卷积层中的参数共享实现高效处理
- 在各种计算机视觉应用中证明有效
- 随着更大数据集和更好架构的持续改进
- 针对相关视觉任务的迁移学习能力
缺点
- 计算密集型训练需要大量资源
- 需要大量标注数据集以获得最佳性能
- 无适当正则化时易过拟合
- 复杂超参数调优以获得最佳结果
- 黑盒性质使解释具有挑战性
结论
本教程演示了使用Python和Keras进行图像识别的卷积神经网络的实际实施。从环境设置到模型评估,我们涵盖了构建有效计算机视觉系统的基本步骤。CIFAR-10数据集提供真实测试场地,而CNN架构展示现代深度学习技术。在继续开发图像识别解决方案时,请记住成功的实施平衡架构复杂性与计算效率,并始终通过严格测试验证性能。此处获得的技能为应对真实世界应用中更高级的计算机视觉挑战奠定坚实基础。
常见问题
CNN的理想层数是多少?
没有通用答案——对于基本任务,从3-5个卷积层开始,对于复杂识别任务增加深度。通过适当的正则化技术平衡深度与计算限制和过拟合风险。
如何提高我的CNN模型的准确率?
通过数据增强、超参数调优、架构优化、正则化方法和迁移学习来提高准确率。尝试不同的优化器、学习率和层配置,同时监控验证性能。
这个教程能用于其他数据集吗?
是的,该方法适用于各种图像数据集。调整输入维度、归一化和输出层以匹配您的特定数据特征,同时保持核心CNN架构原则。
CNN如何处理图像变化,如旋转和缩放?
CNN使用池化层和数据增强来保持对小变换的不变性,但对于大的旋转和缩放变化可能需要特定技术,如空间变换器。
在CNN模型中需要调优的关键参数有哪些?
重要参数包括滤波器大小、层数、学习率、批大小以及正则化技术(如dropout),以优化图像识别任务的性能并防止过拟合。
相关AI和技术趋势文章
了解塑造AI和技术未来的最新见解、工具和创新。
Grok AI:从文本和图像免费无限生成视频 | 2024指南
Grok AI 提供从文本和图像免费无限生成视频,使每个人无需编辑技能即可进行专业视频创作。
Grok 4 Fast Janitor AI 设置:完整无过滤角色扮演指南
逐步指南:在 Janitor AI 上配置 Grok 4 Fast 进行无限制角色扮演,包括 API 设置、隐私设置和优化技巧
2025年VS Code三大免费AI编程扩展 - 提升生产力
探索2025年Visual Studio Code的最佳免费AI编程助手扩展,包括Gemini Code Assist、Tabnine和Cline,以提升您的